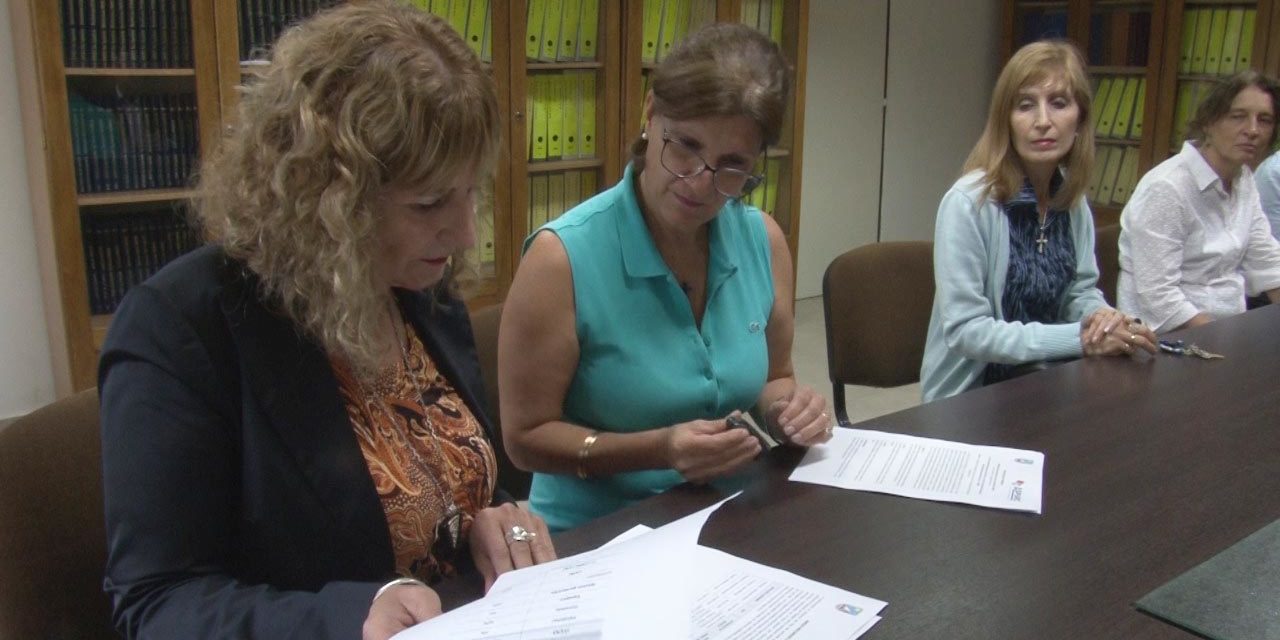
En la sala de Consejo Directivo de Ingeniería, la decana de la Facultad, doctora Miriam Martinello, y la profesora Salma Faiad, presidente de la Acción Social del Personal de la Universidad Nacional de Rio Cuarto (Aspurc) formalizaron el protocolo de trabajo referente a la implementación del proyecto “Integración de tecnologías para el desarrollo de un prototipo de bipedestador autopropulsado”.
El objetivo es adaptar e integrar tecnologías existentes para el desarrollo de un prototipo de dispositivo mecánico–eléctrico del tipo bipedestador móvil que permita la verticalización y el desplazamiento seguro de personas con algún tipo de discapacidad física que le impide sostenerse de pie por si solas. Estará a cargo de los ingenieros Leonardo Molisani, Juan Fontana y Gonzalo Martínez, por parte de la Facultad de Ingeniería, y la profesora Salma Faiad por parte de Aspurc.
Las tareas se llevarán adelante en el laboratorio del Grupo de Acústica y Vibraciones (GAV) dependiente del Departamento de Mecánica de Ingeniería, el cual se encuentra dentro del campus.
“Este proyecto es de gran importancia para nosotros dado que mejora la calidad de vida de quien lo utiliza con grandes beneficios para el afiliado que lo necesite”, destacó Faiad.
Agregó que la obra social aportará a la Facultad de Ingeniería inicialmente, el 20% del monto total estipulado para la realización de las actividades previstas, quedando el saldo condicionado al avance del proyecto conforme a las etapas diagramadas.
La ejecución de este plan de Trabajo se ha estimado en nueve meses y consistirá en la concepción, diseño y construcción de un prototipo de bipedestador móvil destinado a mejorar la calidad de vida de personas con paraplejia. Consta de dos etapas principales, las cuales podrían ser realizadas en forma simultánea: por un lado, el estudio, análisis, diseño y construcción de la estructura mecánica más apropiada para el prototipo de bipedestador y en una segunda etapa el desarrollo de un sistema electrónico para para controlar la velocidad de avance y giro del prototipo.
“Vamos a iniciar las tareas con el bipedestador que actualmente tiene en desuso ASPURC, que requiere de la inclusión de una parte electrónica para ser autopropulsado y servirá como base para el desarrollo del prototipo y las pruebas del mismo, la idea es “motorizarlo” para que la persona pueda manejarlo voluntariamente mediante un mando del tipo joystick”, detalló el ingeniero Juan Fontana, integrante del GAV.
Añadió que en estos nueves meses el objetivo esencial es integrar la tecnología mecánica y electrónica para lograr ese bipedestador autopropulsado, garantizando la seguridad y el buen funcionamiento del mismo. Aseveró que “luego haremos relevamiento de los pro y los contra para optimizar el diseño y construir el prototipo propio”.
Cabe mencionar que el trabajo será interdisciplinario ya que involucra a Ayudantes Alumnos de Ingeniería en Telecomunicaciones y de Mecánica que desarrollan tareas en el Grupo de Acústica y Vibraciones (GAV), como así también a referentes del Laboratorio de Diseño Asistido por Computadora (LACAD); ambos pertenecientes al Departamento de Mecánica de nuestra Facultad.
Mariano Panella, ayudante de Investigación en el GAV y estudiante de Ingeniería en Telecomunicaciones, comentó: “Cuando me sugirieron el tema me pareció sumamente importante por la finalidad que tiene y el impacto social que genera, dentro de los conocimientos que tenemos podemos llevarlo a cabo, aplicándolo en beneficios para nuestra sociedad”.
Acerca del bipedestador
Son estabilizadores posturales que permiten rehabilitar y poner de pie a personas discapacitadas temporal o permanentemente con la cual pueden ejercitar su sistema gastrointestinal, urinario, cardiovascular y óseo. Entre algunos de sus beneficios podemos mencionar que proporciona una correcta alineación anatómica del tronco y las extremidades inferiores, facilita la respiración, aumenta el consumo de oxígeno, favoreciendo la expansión pulmonar, proporciona un beneficio psicológico al paciente por darle la oportunidad de estar de pie, permite la reintegración al ámbito laboral y social, entre otros.
Fuente: Área de Comunicación de Ingeniería